|
|
|
Самое самое!
|
|
|
|
Новости партнеров
|
|
Проверенные магазины,
по продаже комплектующих
для сборки квадрокоптеров:

Товары со скидками от Банггуд
смотреть по ссылке

Более 100 моделей квадрокоптеров
в наличии, с бесплатной доставкой по России.
Подобрать модель можно здесь
|
|
Это интересно
|
|
|
|
Как настроить?
Настройку квадрокоптера производят при помощи специализированного программного обеспечения. Не бывает универсальной
программы для настройки. Для каждого полетного контроллера она своя. Например:
|

Полетные контроллеры серий APM 2.6/2.7/3.1 и т.п, а так же их разновидности типа DEVO-M, а также 3DR Pixhawk, NAVIO2 и подобные настраиваются при помощи программы
Mission Planner официальный сайтпрограммы
Скачать ее Вы сможете здесь
|
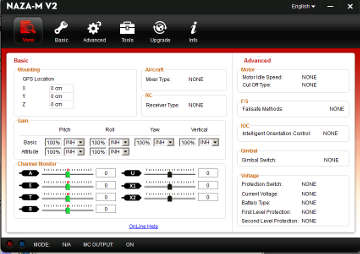
Полетные контроллеры компании DJI, настравиваются своей программой .Это DJI NAZА Assistant. Причем для каждой версии -своя программа.
Скачать программы можно по этой ссылке:
Полный перечень контроллеров DJI : WooKong-M, Naza M, NAZA H, NAZA M Lite, Новые полетные контроллеры A2 и A3. Самые популярные из них - это контроллеры NAZA.
|
|
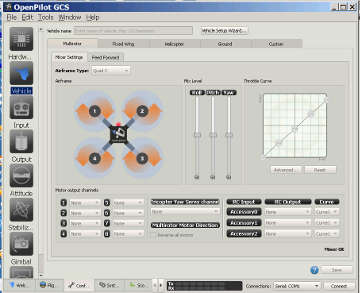
Гоночные FPV квадрокоптеры, собранные на контроллерах CC3D, Naze32, Flip32, Spracing F3 настраиваются через свои программы. Это:
1. OpenPilot
2. LibrePilot . Официальный сайт:
Последнюю версию ПО можно скачать здесь:
|
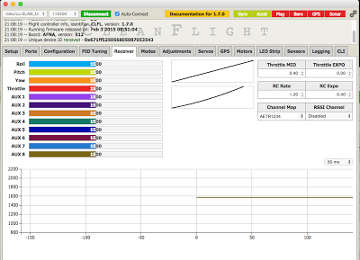
Еще одна разновидность программного обеспечения для настройки полетных контроллеров CC3D, Naze32, Flip32, Spracing F3
Cleanflight официальный сайт
Подробное описание можно скачать здесь:
|
Общий алгоритм настройки квадрокоптеров:
1. Установить программу, подходящую для Вашего полетного контроллера
2. Добиться устойчивого соединения компьютера с платой контроллера.
3. Проверить , настроитьт работу приемник- пульт, приемник должен быть подключен к полетному контроллеру.
Для этого - выбрать нужный Вам режим PPM, PWM, SBUS какой конкретно, смотрите в документации на Вашу аппаратуру.
3.1. Проверить соответствие каналов приемника нужной Вам функции , при необходимости откалибровать
3.2. Настроить режим "Fail safe" - поведение квадрокоптера при потере сигнала с пульта.
3.3. Настроить переключатель полетных режимов квадрика
3.4 Произвести калибровку гироскопов и акселерометров. Проверить результат. В некоторых программах, таких как Mission Planner, LibrePilot и Cleanflight это можно посмотреть прямо на экране монитора.
3.5. Проверить правильность вращения двигателей.
Примечание:
Мехнизм настройки квадрокоптеров будет отличаться для каждой программы.
Все настройки должны делаться без пропеллеров !!!!!
При сборке квадрокоптера опирайтесь на техническую документацию, а не на цвет проводов, который Вы увидели в Ютубе.
|
|
| <!--LiveInternet counter--><script type="text/javascript"><!--
document.write("<a href='//www.liveinternet.ru/click' "+
"target=_blank><img src='//counter.yadro.ru/hit?t50.6;r"+
escape(document.referrer)+((typeof(screen)=="undefined")?"":
";s"+screen.width+"*"+screen.height+"*"+(screen.colorDepth?
screen.colorDepth:screen.pixelDepth))+";u"+escape(document.URL)+
";h"+escape(document.title.substring(0,80))+";"+Math.random()+
"' alt='' title='LiveInternet' "+
"border='0' width='31' height='31'></a>")
//--></script><!--/LiveInternet-->
<!-- Rating@Mail.ru counter -->
<script type="text/javascript">
var _tmr = window._tmr || (window._tmr = []);
_tmr.push({id: "2777898", type: "pageView", start: (new Date()).getTime()});
(function (d, w, id) {
if (d.getElementById(id)) return;
var ts = d.createElement("script"); ts.type = "text/javascript"; ts.async = true; ts.id = id;
ts.src = (d.location.protocol == "https:" ? "https:" : "http:") + "//top-fwz1.mail.ru/js/code.js";
var f = function () {var s = d.getElementsByTagName("script")[0]; s.parentNode.insertBefore(ts, s);};
if (w.opera == "[object Opera]") { d.addEventListener("DOMContentLoaded", f, false); } else { f(); }
})(document, window, "topmailru-code");
</script><noscript><div style="position:absolute;left:-10000px;">
<img src="//top-fwz1.mail.ru/counter?id=2777898;js=na" style="border:0;" height="1" width="1" alt="Рейтинг@Mail.ru" />
</div></noscript>
<!-- //Rating@Mail.ru counter --> |
|